陈智雯
Andrea
Back
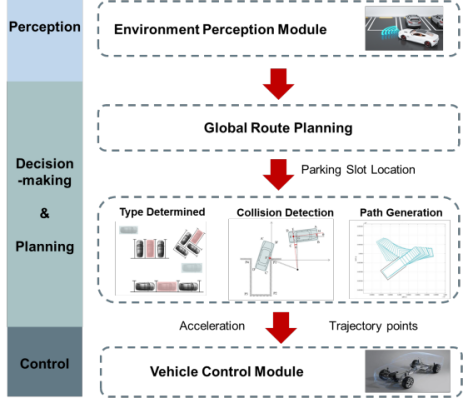
Efficient and Flexible Autonomous Parking Planning based on Adaptive Multi-Step Motion Primitives
Submitted to Journal of Intelligent Transportation Systems: Technology, Planning, and Operations
Status: Under First Round Revision
Previous
: Parking Field Test
Next
: A Survey of Reinforcement